二级学科重点学科
控制理论与控制工程
南阳师范学院机电工程学院控制理论与控制工程学科依托创建于2009年的自动化本科专业,现已有四届毕业生。近年来,本学科在科研、教学、学科专业建设等方面取得了显著的成效。学科团队现有人员19人,其中教授3人、副教授6人,半数教师具有博士以上学位。通过学科团队成员的共同努力,团队成员近年来先后承担了国家级和省部级科研技术项目10多项,先后在国际国内重要期刊上发表高水平EI(SCI)论文30余篇,获得国家发明专利及实用新型专利10余项。除此之外,团队近半数成员有在企业挂职锻炼的经验,为企业解决了众多生产改造中的实际难题。随着合作的持续深入,已初步达成长期意向合作项目3项。团队的“双师型”人才在全校各院系比例中名列前茅,成员学术素质过硬,专业结构和年龄结构合理,具备良好的工作基础和实验条件,已取得突出成绩,具有明显的创新潜力。
机电工程学院为我校新成立工科院系,亟需依靠重点学科建设更新、转变办学理念,助力本科专业建设。本学科作为学院目前唯一的优势学科,需要通过重点学科建设,进一步集聚学科创新要素,进一步提升科技创新能力和科技服务地方的能力。本学科建设将发挥示范作用,能带动我院其它学科的发展,这也是提升人才培养质量水平的需要。
本次结合我校转型发展及实施“工业4.0”的产业发展需求,并充分考虑到我院人才梯队及科研平台建设情况,提出了“两个平台,三个方向”的“两化”融合发展规划。如图1所示,在工业4.0的大背景下,对控制理论与控制工程学科的发展提出了两大任务。其一是继续探索前沿,向着更高级的人工智能化发展;其二对庞大的传统工业进行信息化升级改造,推动智能制造为主导的第四次工业革命。为此,我院该学科将通过对现有资源整合优化,未来将着力打造两个学科建设平台——工业机器人及应用平台和制造业信息化平台。围绕这两个平台,开展三个方向的重点研究。其中,智能机器人控制技术方向主要研究不同信息获取模式下的智能机器人导航与控制技术,针对结构化和半结构化,以及自然环境等不同外围环境的特点,采用不同的传感器获取环境信息,研究智能机器人的路径规划、任务执行、服务功能等多方面内容,力图实现特殊情况下机器人导航与智能控制问题;工业集散控制理论与应用方向主要借助制造业信息化平台,研究解决传统工业生产线的信息化改造难题;而智能控制与智能系统作为目前本学科中最活跃的一个研究方向,将同时跨越两个学科建设平台,将最新的人工智能理论、工业机器人技术和制造业信息化系统相结合,通过“两化”融合落实“工业4.0”的实施。
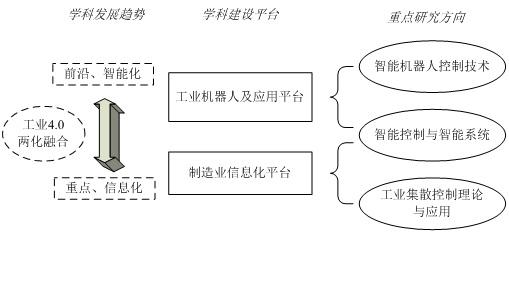
图1我院控制理论与控制工程学科发展规划
本学科团队建立之初就设立了以服务社会为宗旨,在进行基础研究的同时,积极开展与企业结合,为企业服务,推动社会生产力的发展。团队依托工业机器人及应用平台,针对工业机器人开发配套的智能自动化传感器,致力于提升我国工业机器人及自动化智能技术水平的应用性研究,并以此平台来进行推广应用研究;依托制造业信息化平台进行校企合作,目前在与企业联合开发方面,已经与深圳雷柏科技有限公司、南阳淅减汽车减振器有限公司开展了技术合作,与河南天力电气设备有限公司、西峡汽车水泵股份有限公司开展了技术服务。南阳市作为河南省重要的制造业和汽车产业链聚集区,正积极加快科技进步,构建科技创新平台,本学科的建设有利于完善和优化资源配置,增强区域经济的自主创新能力,将能满足区域经济的发展对人才和科研水平的需求,服务区域产业集群,加快当地制造业现代化的转型升级,改善河南经济发展结构布局,增强河南省经济发展后劲。


 位置:
位置: